Context
Tree nurseries are one of the nastiest outdoor environments a robot can be asked to work in: limited grip, constant mud, narrow aisles, bamboo stakes everywhere, and saplings the owner really does not want touched. At Exobotic we designed Land-A2, an electric tool-carrier meant to operate exactly in that environment, carrying sensor and treatment payloads along rows week after week. I was the main software engineer on the project and followed the electromechanical design closely.
Electromechanical design
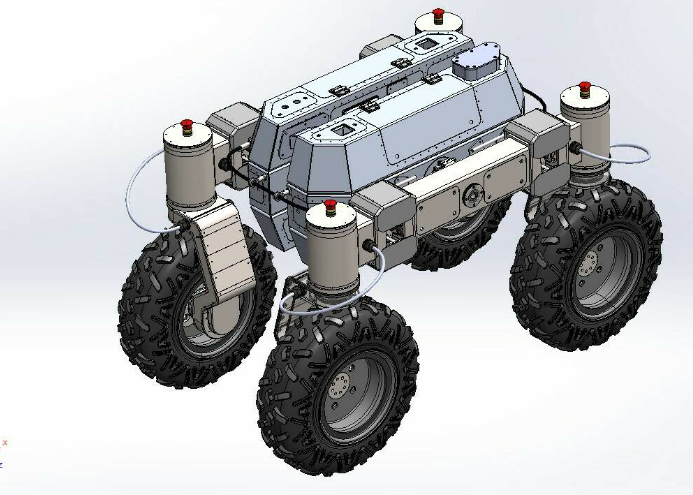
The engineering bet is agility over size: rather than scaling up wheels and horsepower to plough through, Land-A2 is small, light, and highly manoeuvrable. It runs on 4-wheel drive with 4-wheel independent steering, so it can do true zero-radius turns and crab sideways into and out of a row without changing heading. A skid-steer would dig ruts and damage the soil around the trees; with 4WS the wheels roll rather than scrub.
- Wheel motors. In-hub electric drive, 100 Nm nominal / 320 Nm peak per wheel, designed in-house.
- Speed & payload. Up to ~6 km/h, 200 kg centrally-mounted payload.
- Chassis. Patent-pending modular construction with adjustable wheelbase, spring-damped suspension, and a centrally-rotating payload area to reduce sensor vibration.
- Batteries. Quick-swap modules for field replacement, no tools required.


Navigation and software stack
This is where I spent most of my time on Land-A2. The goal was a stack an operator with no robotics background can drive: draw a route, press start, come back later.
- Sensors. Dual-antenna RTK-GPS (centimetre position and heading, no motion needed for yaw), low-mounted LiDAR, multiple cameras and active IR / white lighting. The dual-antenna choice is load-bearing in a nursery, where scrub vegetation causes near-ground occlusions.
- Navigation. RTK-GPS waypoint following with smooth interpolation, plus a higher-level planner for row entry/exit, headland turns and speed adaptation. An optional visual-only mode (used at sites like Eriksbo) keeps the robot running where GPS is unreliable.
- Obstacle avoidance. Two-stage: a LiDAR occupancy map stops the robot on anything unexpected, and an AI classifier on the cameras filters out false positives (tall grass, shadows, leaves) so it will still drive close to the trees.
- Operator UI & stack. A web-based GUI to record paths by teleop, edit waypoints and start/pause/return-home, on top of ROS 2 on Ubuntu Server, containerised with Docker, orchestrated as
systemdservices.


In the spotlights
Land-A2 has been shown at agricultural fairs and used in live customer demonstrations. Three LinkedIn posts give a flavour:
Meet Land-A2
First public unveiling of the 4WD/4WS platform.
SIMA 2022 — Paris
Land-A2 on the Exobotic stand at the SIMA international agtech fair.
Agribex 2023 live demo
Land-A2 running a live autonomy demo in Brussels.
5 days, 40 hours of demo
Endurance run at the Agribex fair.
Going further
- Exobotic blog post: Land-A2 prototype.
- Platforms overview: exobotic.com/platforms.
- Feature article (FR, Hectares magazine): Comment est-ce fabriqué – les robots d’Exobotic Technologies.
- A small personnal contribution to open-source software: https://github.com/ros-controls/ros_controllers/pull/441
- Follow-up on the camera-only perception pipeline: Arboto — tree-measurement spin-off.