Robotic embodiment
The combination of brain-inspired AI and robotics is at the core of our work in the Human Brain Project. Applying machine learning methods to control robots is not as straightforward as it may seem: robots generally evolve in noisy and continuously changing environments, but on the other hand, their mechanical complexity can be an asset to simplify the control. This is studied through the fields of embodiment and morphological computation. Extreme examples — like McGeer’s passive walker — have shown that mechanical structures can produce natural behavior with no controller at all.
Towards a formalization
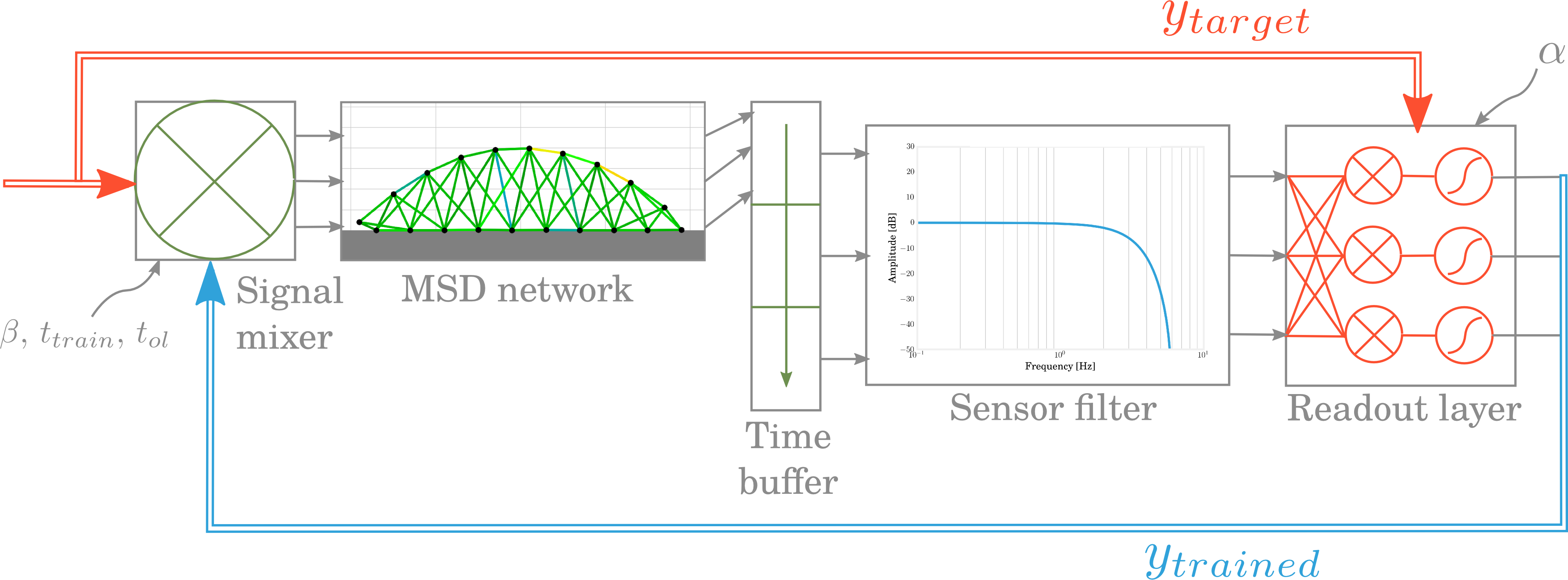
Recent investigations tried to formalize the relation between the dynamical complexity of a mechanical system and its capability to require simple control. To extend this research, we developed a basic simulator of mass-spring-damper (MSD) networks and optimized a naive locomotion controller to provide them with efficient gaits in terms of traveled distance and dissipated power.
Three experiments were done in open-loop to determine the influence of the size of a structure (number of nodes), the compliance (inverse of spring stiffness) and the saturation at high powers.
In the second part of the work, we demonstrated the capacity of realizing closed-loop control in a very simple way, requiring very few numerical computations.
Our contribution
A full discussion of the results is accessible directly in the Frontiers article under Creative Commons license.
This work was realized at Ghent University together with Jonas Degrave, Francis wyffels, Joni Dambre and Benonie Carette. It is mainly academic and provides a methodology to optimize a controller for locomotion, along with indications on what we can expect from its complexity to realize this experiment. The same knowledge was reused later in the project to conduct similar experiments on quadruped robots both in the real world and in simulation using the Neurorobotics Platform (NRP) developed in HBP.
Going further
- Full paper (open access).
- Simulator code: github.com/Gabs48/SpringMassNetworks.
- Follow-up on HyQ: Compliance and cerebellum-inspired control on HyQ.