Context
Between June and September 2018 I spent four months as a visiting researcher in the Dynamic Legged Systems (DLS) group at IIT, Genoa, under Claudio Semini and Victor Barasuol, as part of my PhD at Ghent University and within the Human Brain Project. The DLS group designs and operates HyQ, a hydraulically actuated 90 kg quadruped whose active-impedance joints can emulate any ratio of stiffness and damping. I joined the team working on HyQ’s locomotion stack and ran two series of experiments that later became the two papers summarised below: one on the role of joint compliance, one on a cerebellum-inspired stance controller.
Method
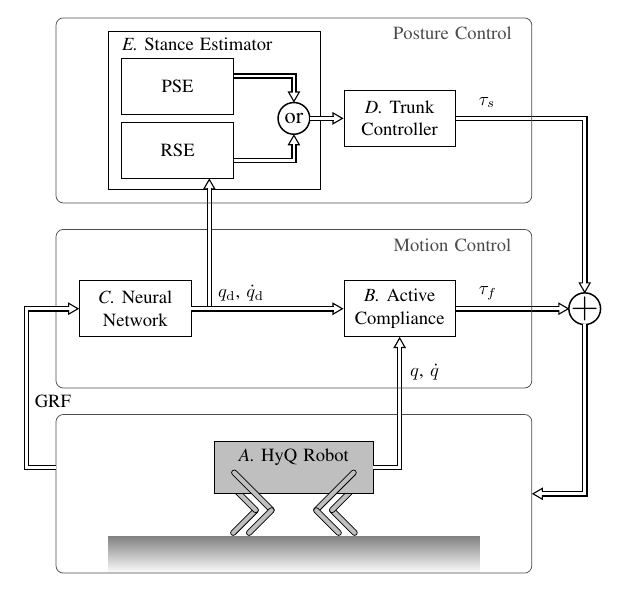
Both papers share the same reflex-based architecture, built on top of HyQ’s Reactive Controller Framework (RCF). Three layers:
- Active compliance at the joints, emulating a rotational spring-damper \(\tau_f = \tau_{ext} + K_p(q_d - q) + K_d(\dot q_d - \dot q)\), with tunable \(K_p\) and \(K_d\).
- Reflex-based motion controller: a feed-forward neural network that takes only the four Ground Reaction Forces (GRFs) as inputs and outputs the eight hip and knee joint positions and speeds. It is inspired by an Extreme Learning Machine (time buffer + random hyperbolic-tangent hidden layer + linear readout), with the readout trained by FORCE: \(\mathbf{W}^{\mathrm{out}}_{k+1} = \mathbf{W}^{\mathrm{out}}_{k} - \mathbf{P}_{k+1}\,\mathbf{x}_{k}\,\mathbf{e}^{T}_{k+1}\)
- Cerebellum-inspired stance module sitting above the reflex layer, which corrects posture and balance based on which foot is supposed to be in contact.
Paper 1: Effect of compliance on morphological control
Using this architecture as a probe, I swept 3,600 impedance settings on HyQ in simulation to understand how does compliance interact with the control task and if we could illustrate a transfer of morphological computation to compliant bodies?
We observed that the cost of Transport grows almost exponentially with stiffness in the closed-loop system. In other words, the biologically-inspired control architecture shows good performance only on compliant bodies.
More details are discussed in the paper Effect of Compliance on Morphological Control of Dynamic Locomotion with HyQ.
Paper 2: Cerebellum-inspired stance control
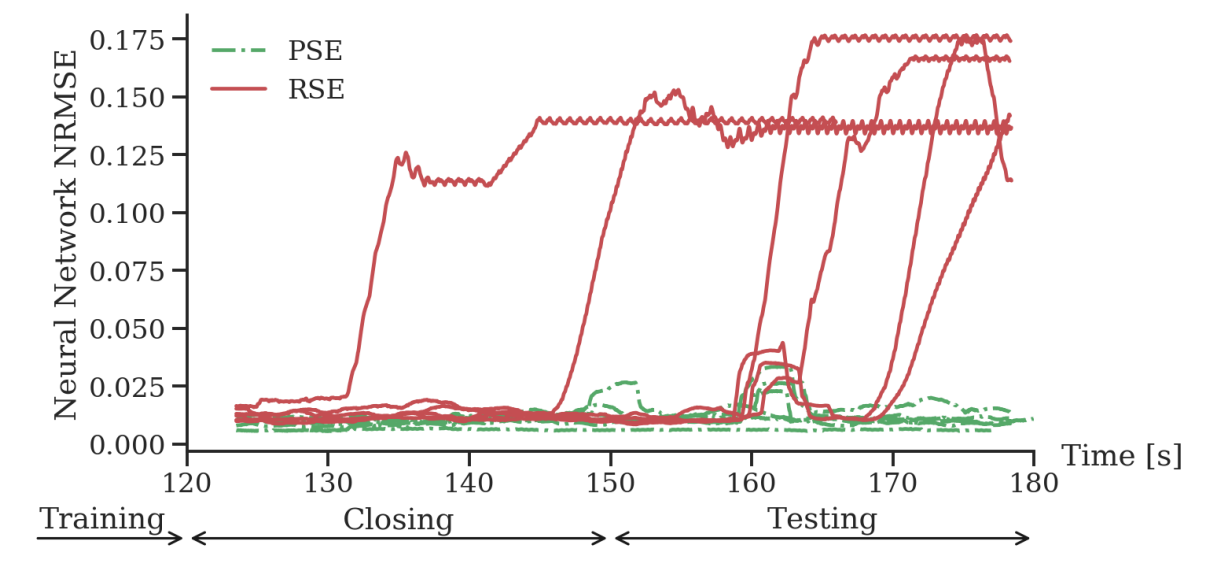
In a second paper, I used the same control architecture to answer if a biologically-inspire cerebellum controller (top layer of the architecture) was helping to stabilize the locomotion control. To that goal, I implemented two different architecture for that cerebellum controller:
- Predictive Stance Estimator (PSE): \(\mathrm{PSE}=f(t)\), driven only by the desired gait pattern, biologically motivated by studies in human ataxia.
- Reactive Stance Estimator (RSE): \(\mathrm{RSE}=f(z_{\mathrm{FR}},z_{\mathrm{FL}},z_{\mathrm{HL}},z_{\mathrm{HR}})\), driven by the reflex network’s own foot-height predictions, mimicking a feedback signal from the spinal chord to the cerebellum.
Over twelve experimental trials on the real HyQ, all PSE trials reproduced the target gait; five out of six RSE trials diverged. From a dynamic point of view, this indicates that reflex-based locomotion requires the clock signal to stabilize its limit cycle and achieve robust locomotion.
More insights are provided in the paper Stance Control Inspired by Cerebellum Stabilizes Reflex-Based Locomotion on HyQ.
Going further
Alongside the two published studies, I also got HyQ to locomote end-to-end in simulation using deep reinforcement learning, specifically using TRPO (Trust Region Policy Optimization), on the same Gazebo simulation model as the experiments presented here. The results and the code were never published however.
To follow-up on this subject:
- PhD thesis: Biologically inspired locomotion of compliant robots, UGent, 2021.
- Code Repository: gurbain/hyq_ml on GitHub.
- DLS group and HyQ platform: dls.iit.it.
- Mass-spring network precursor: Mass-spring networks for locomotion.