A small compliant quadruped for brain-inspired control
Tigrillo is the bio-inspired compliant quadruped platform I used throughout most of my PhD at AIRO — Ghent University. It is designed to be a cheap, reproducible, compliant testbed for experiments on Central Pattern Generators (CPGs), reservoir computing and transfer learning between simulation and the real world.
The robot uses tendon-driven actuators and spring-loaded knees to produce the passive compliance needed to study morphological computation on a real device — rather than purely in simulation.
Bio-inspired controllers
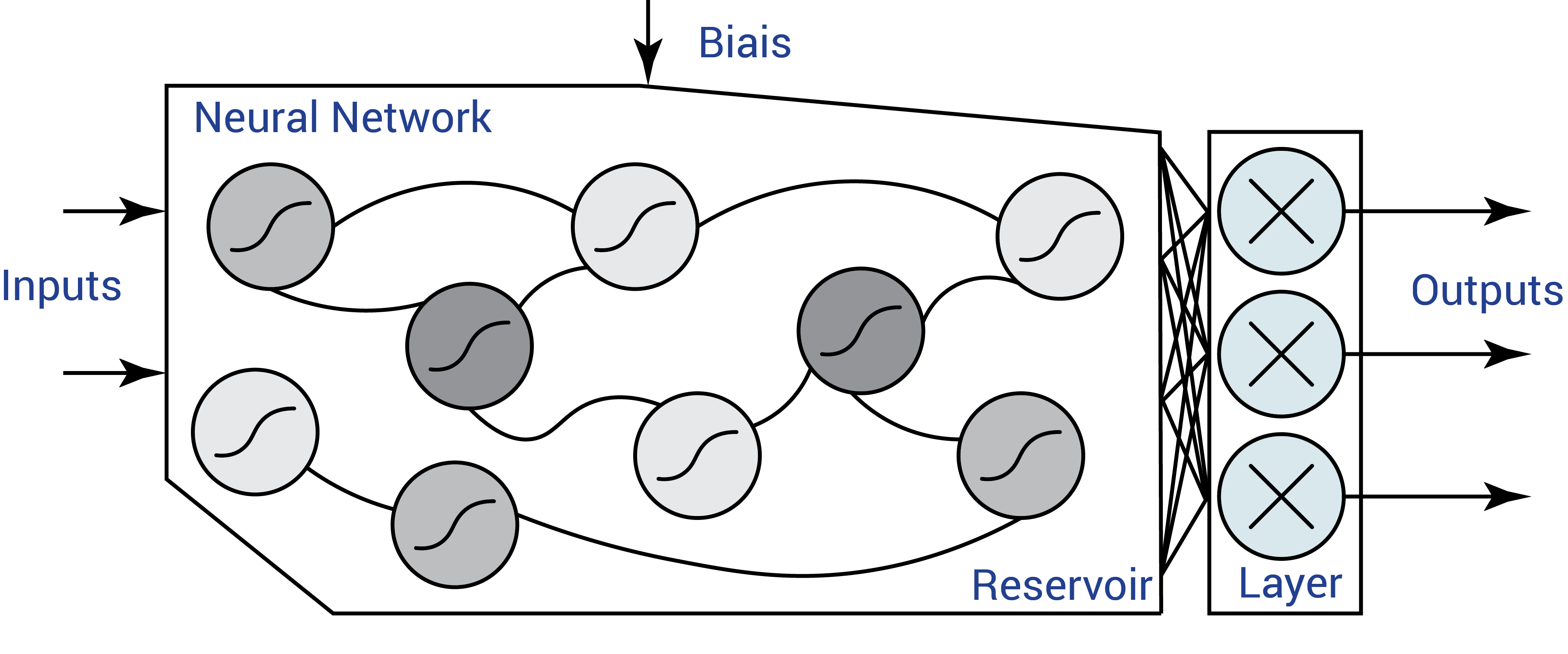
On the control side, we developed a stack of bio-inspired controllers built around:
- Central Pattern Generators producing the basic rhythmic leg trajectories;
- Liquid State Machines (reservoir computing on spiking neural networks) as a general-purpose non-linear readout;
- SpiNNaker neuromorphic hardware (Spin3 board) mounted directly on the robot to run the spiking part in real time on dedicated neural hardware.
Simulation and sim-to-real
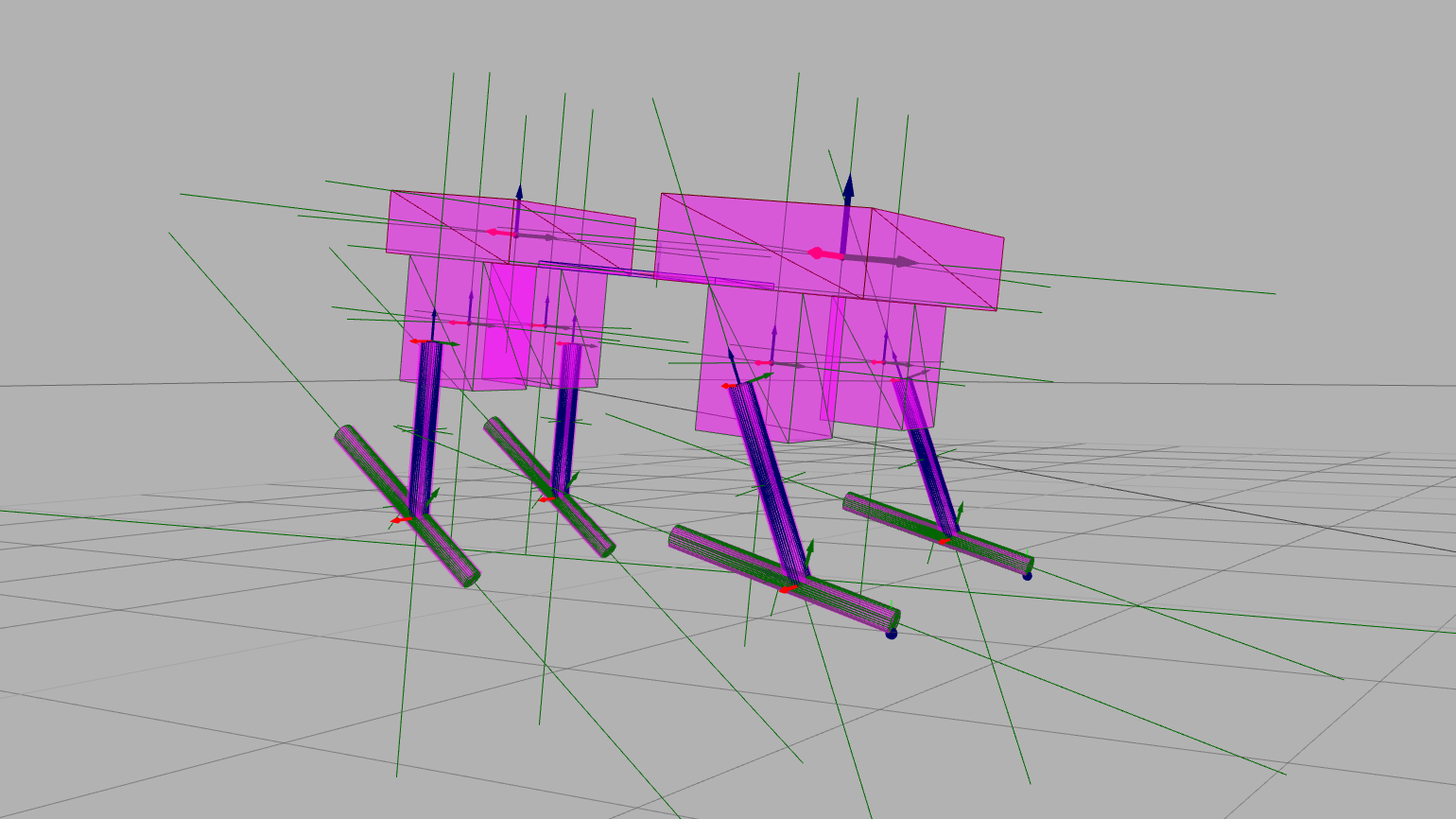
To iterate safely, Tigrillo was simulated in MuJoCo / Gazebo and integrated into the HBP Neurorobotics Platform so the same brain models could be tested in simulation and on the physical robot. This enabled a series of sim-to-real experiments using domain randomization techniques to close the reality gap — see the simulation-to-reality post.
Transfer learning
A large part of the experiments ran on the transition from artificial neural networks (trained offline with standard deep-learning tools) to spiking neural networks (deployable on neuromorphic hardware and biologically plausible). We worked on recipes for weight transfer, layer-by-layer distillation, and online fine-tuning on the robot.
Going further
- Tigrillo — hardware details and electronics.
- Simulation-to-reality with domain randomization.
- Mass-Spring Damper Networks — the simulated foundation of this line of work.
- SpiNNaker at the University of Manchester.